 Dyrk.org
Dyrk.org[Voiture Autonome] Comment ça marche !

Salut à tous,
Je suis plus ou moins nouveau sur ce sujet, et je vais donc vous amener progressivement à constater mes quelques recherches, pour que vous puissiez vous aussi, vous faire une idée !
Aussi vous aurez probablement un regard critique et des remarques sur le sujet.
Peut-être aurez-vous aussi de nouvelles informations à nous partager grâce aux commentaires.
Tout d’abord, et comme souvent, je m’adapte à mes moyens financiers et matériels en partant du principe que nous sommes tous « pauvres », et que nous devons réussir avec peu de moyens !
Pour tout ce qui va suivre, vous pourrez faire vos expériences chez vous avec :
- Un smartphone (caméra + gyro)
- Un laser
Bien entendu, les voitures autonomes disposent de plus de moyen et donc de plus de capteur !
Anticiper les secondes à venir
L’idée n’est pas de traiter une situation à un instant présent, mais de traiter une situation à son instant d’après.
Anticiper une future collision, un futur stop, …
Un traitement d’images à l’aide d’une caméra
Notre outil le plus précieux lorsque nous sommes au volant, c’est la vue (nos yeux) !
Nous regardons notre environnement et grâce à des repères visuels nous pouvons nous adapter aux diverses situations possibles !
Anticiper grâce à la caméra
Lorsque nous regardons à travers une caméra, nous voyons quelques choses en face de nous.
Sauf que dans une voiture qui avance, la caméra avance aussi.
Donc ce que nous voyons à un instant T, sera notre future position !
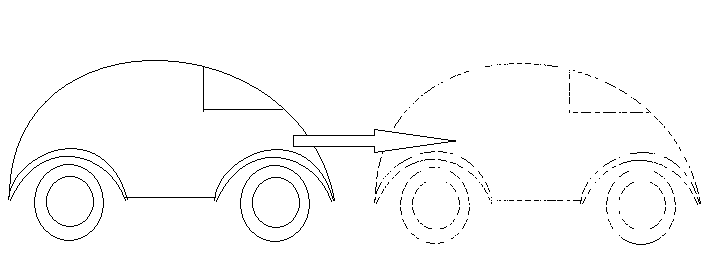
Il faut donc réfléchir, comme si nous étions déjà dans la position suivante.
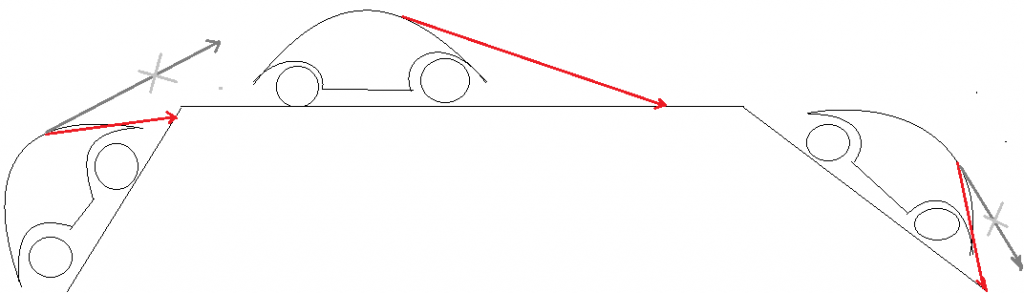
Pour cela je me fixe 2 points sur une caméra.
Ces 2 points correspondent aux extrémités gauche et droite de mon véhicule !
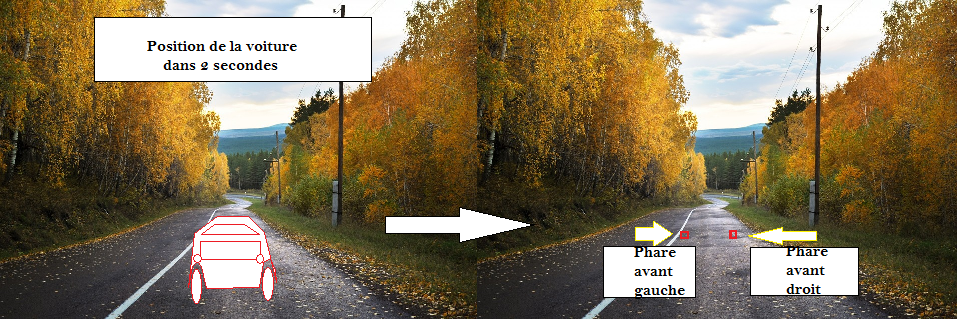
(Oui Oui je vous ai dessiné une voiture de dos sur l’image de gauche …)
Une fois que l’on a déterminé, les 2 extrémités de l’avant du véhicule, nous les utilisons comme point de repère !
Ils peuvent nous servir par exemple à détecter si nous dévions de notre trajectoire.
Si nous roulons sur une ligne blanche … sur l’herbe …
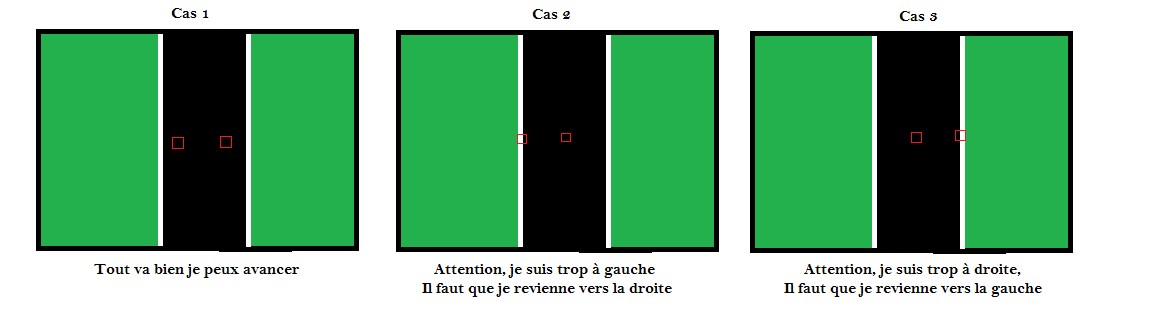
Jusque-là, vous comprenez plus ou moins le principe basique, la voiture se repère grâce à ces 2 points.
Elle détermine ensuite via différents critères, si tout va bien, ou s’il faut corriger sa trajectoire, grâce aux lignes blanches, ou à la couleur de la route, … (chacun gère à sa sauce)
Je vous ai développé un script minimaliste de traitement d’images, pour déterminer les bons cas, et les mauvais cas ici : https://jsfiddle.net/5utehvL0/10/
On peut également imaginer de la reconnaissance de forme, histoire de reconnaître les différents feux : les ronds rouges, verts, oranges
Ou encore les panneaux via de l’OCR (reconnaissance de texte)
Utilisation d’un Gyroscope
Le gyroscope est un outil pour calculer la disposition / l’inclinaison d’un objet.
Dans notre cas, il est important de savoir dans quelle position est la voiture …
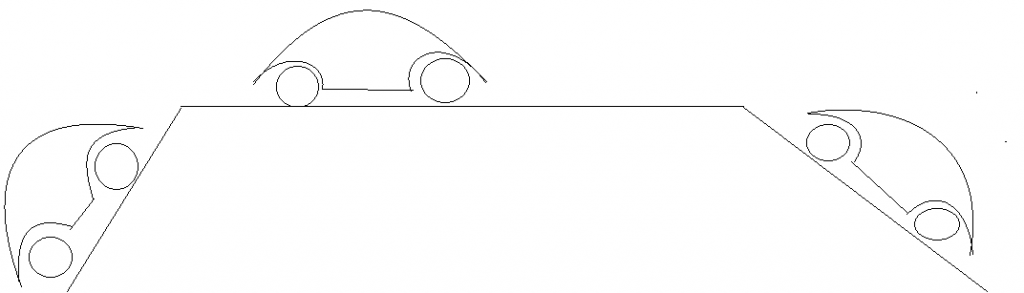
Car si nous souhaitons repérer la position de nos futurs points de repère, il faut tenir compte de l’inclinaison du véhicule, car ils ne seront pas les mêmes d’une position à une autre.
L’idée, étant de garder toujours nos repères sur la route, et non pas dans les nuages ou avec une distance « faussée » par le relief du paysage !
Détecter les obstacles et ralentissement grâce au laser
Connaitre l’image et savoir le comportement à adopter c’est très bien.
Mais savoir avec précision les distances c’est mieux !
Aussi rien de plus fiable que l’utilisation de laser pour ça … (il est possible d’avoir recours à de l’ultrason et de l’infrarouge, mais les résultats sont de faibles qualités)
Cela permet d’adapter la vitesse du véhicule.
Le laser permet de calculer et recalculer les distances avant un obstacle, cela peut être pour détecter un ralentissement, un véhicule à l’arrêt … une personne qui vient de traverser la route.

Je l’admets, le laser est quelque chose de plutôt coûteux, mais ça reste vraiment ce qu’il y a de mieux …
Sauf si vous souhaitez créer une voiture autonome de la taille d’un porte-clef sur un petit circuit en carton ;)
Histoire de vous simplifier la vie, vous pouvez en trouver un pas mal ici avec une précision de 50 mètres !
Soit la distance de sécurité pour un véhicule roulant à 90 km/h
SF02 Laser Rangefinder – 50 m : https://www.parallax.com/product/28043
Conclusion
Pour l’instant c’est tout !
J’ai abordé ici les quelques parties importantes à mon sens.
Néanmoins, il existe une multitude de capteurs, permettant d’accroître la reconnaissance de l’environnement.
Des capteurs thermiques par exemple, utiles pour reconnaître par la chaleur les « humains ».
Mais en mutualisant les diverses méthodes que je vous ai présentées, et avec un peu de matos, vous devriez parvenir à quelque chose de basique mais de fonctionnel !
À l’heure actuelle je développe un POC (proof of concept / démo) sur smartphone.
Celui-ci n’est pas encore suffisamment abouti pour vous en faire une démonstration ^^
Mais il fera probablement le sujet d’une future vidéo !